Kvantita vody
2. Mapovanie reliéfu dna vodnej nádrže
Poznanie priebehu reliéfu dna vodnej nádrže umožňuje spracovanie viacerých výstupov pre potreby vodohospodárstva. Jednak je možné použiť digitálny model reliéfu (DMR) pre popis morfológie, ako aj určiť hĺbky vody, resp. parametre batygrafickej krivky (batygrafická krivka vyjadruje priebeh objemu vody a veľkosti plochy hladiny v závislosti od aktuálnej úrovne hladiny vody v nádrži), prípadne vytvoriť profily nádrže.
Pri tvorbe DMR z meraných údajov (bodov) môžu byť, vo všeobecnosti, použité zdrojové údaje rôznych typov týkajúce sa ich rozmiestnenia. Jednotlivé body DMR, ktoré sa nachádzajú na dne vodnej nádrže, sú definované súradnicami x a y v rôznom usporiadaní.
Zber týchto údajov je možné vykonať viacerými spôsobmi, ako napríklad:
- geodetické zameranie vypustenej nádrže,
- geodetické zameranie nádrže, v ktorej sa nachádza malá hĺbka vody,
- zameranie profilov princípom nivelácie v presne stanovenom profile (napr. natiahnutie lana a využitie člna na vykonanie nivelácie),
- zameranie bezkontaktným systémom s využitím sonaru a geodetického merania polohy (totálna stanica, GNSS prijímač) (Holubová, 1998).
Pri meraní s využitím sonaru sa používajú tri základné konštrukčné typy sonarov:
- jednolúčový (singlebeam) sonar,
- viaclúčový (multibeam) sonar,
- sub-bottom profiler sonar - sonar snímkujúci priebeh, resp. vrstvy sedimentov, nielen hĺbku.
Pri meraní single-beam sonarom sa pre určenie polohy a výšky plavidla využíva systém GNSS alebo totálna stanica. Pre určenie hĺbky sa používa jednolúčový sonar, ktorý meria vzdialenosť medzi sonarovou sondou, umiestnenou spravidla v blízkosti hladiny, a dnom nádrže pod sondou. Na meranie sa využíva princíp určenia vzdialenosti ako podielu rýchlosti šírenia zvuku vo vode a veľkosti časového intervalu medzi odvysielaním a prijatím akustického signálu a vedomosti, že za daný čas signál prekoná vzdialenosť sonar-dno dvakrát: (1) najprv prekoná signál túto vzdialenosť od sonaru po dno, kde sa (2) odrazí a vracia sa späť po rovnako dlhej trase. Preto možno vzdialenosť vypočítať ako \( s = \frac{\frac{v}{t}}{2} \). Nadmorská výška sa následne určí výpočtom na základe geometrického vzťahu medzi určením nadmorskej výšky plavidla, vzdialenosti umiestnenia sonaru od bodu, ku ktorému je určená nadmorská výška plavidla a meranej vzdialenosti sonaru od dna nádrže (obr. 1).
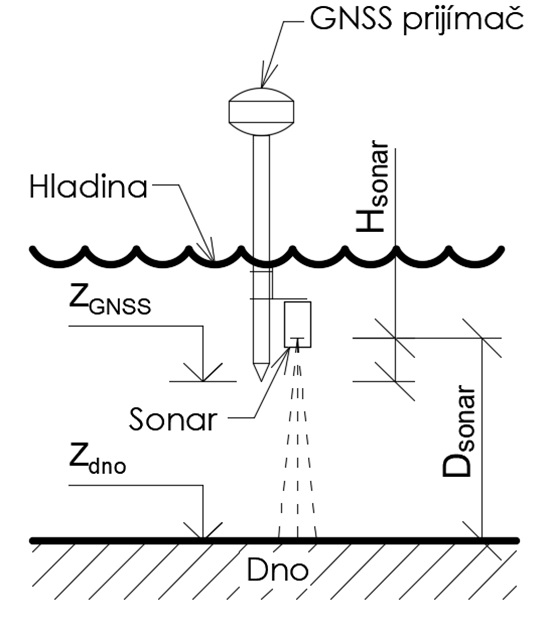
Zdno = ZGNSS + Hsonar - Dsonar
kde: Zdno – nadmorská výška dna [m n. m.]; ZGNSS – nadmorská výška meraná pomocou GNSS [m n. m.]; Hsonar – výška sonaru nad hrotom výtyčky GNSS prijímača [m]; Dsonar – hĺbka meraná sonarom [m].

